产品概述
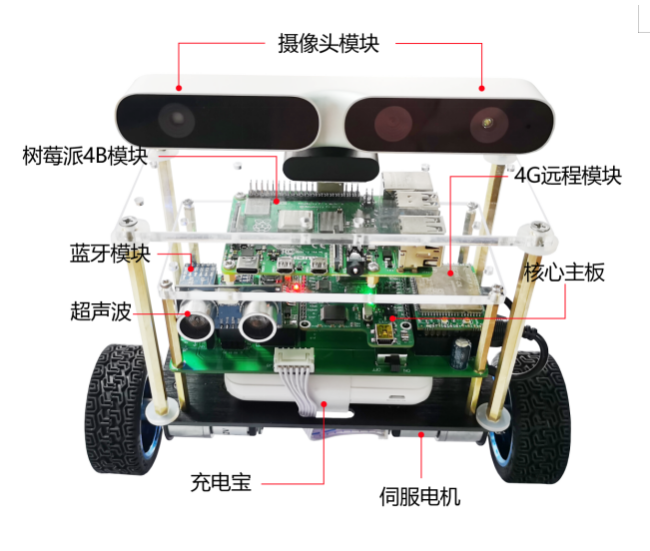
两轮智能平衡车(型号:FLY-AI-2)是一套模块化、可扩展的教学套件,由电气部分,机械部分和系统控制器软件部分组成。开源智能平衡车平台由DSP-TI28069/STM32主控板、轮毂电机底盘、转接板、移动电源、电源管理模块、陀螺仪模块、OLED显示模块、蓝牙模块、无线模块、WIFI模块、驱动模块、超声波模块、语音控制模块、4G远程模块、树莓派和摄像头模块组成。采用模块化设计,各模块通过接插件连接,可扩展其他模块。可以实现智能平衡车的平衡控制、行走控制、避障、手机APP控制、4G远程控制、语音控制、视觉识别跟随和多台调度控制功能。系统底层代码开源,控制接口开放,方便二次开发。
它支持C语言开发,同时也支持基于MATLAB/simulink的开发,通过系统的搭建组装和调试,可以实现智能车的平衡控制、循迹、避障和手机 APP 控制等基本功能,还可以通过开放的平台,开发出多车跟踪、围堵等功能。该平台中级版功能包含蓝牙,wifi,4G,5G无线远程控制技术,高级版搭在树莓派4B系统和三合一体感摄像头,可以利用计算机视觉技术实现平衡车目标跟随功能,人脸识别,人体识别与追踪,完成机器视觉,机器学习相关的实验,可以作为自动化,计算机,人工智能,机器人相关专业的教学实践平台,作为创新创客实验室和电子实训的平台,作为创新创业类课程的实践平台,作为嵌入式开发,机器人开发,人工智能,计算机视觉开发学习平台。该产品开源软硬件,提供完备的学习使用教程,可以零基础快速掌握相关功能的技术。
主要性能参数指标
(一)硬件要求
★1.主控板采用TI TMS320F28069型号芯片,******90MHz时钟频率,高达256KB的闪存和100KB的SRAM,支持FPU浮点运算能力。主控板引出40引脚接口的硬件资源,便于二次开发,集成板载仿真器XDS100V2。
2.移动电源:12V,2800mAh及以上。
3.电源管理模块:TI TPS54340 & TI TPS54331DR型号芯片。
4.电机驱动模块:TI TB6612FNG型号芯片,双通道电路输出,可同时驱动2个电机,具有4种电机控制模式:正转/反转/制动/停止;PWM支持频率高达100kHz。
5.陀螺仪模块:MPU6050型号芯片,6轴IMU传感器,集成3轴加速度计和3轴陀螺仪,可解算各个方向角度和速度。
6.蓝牙模块:TI CC2540型号芯片。
7.超声波模块:HC-SR04型号芯片,包括超声波发射器、接收器与控制电路,可提供2cm-400cm非接触式距离感测功能,测距精度可达3mm。
8.4G远程模块:EC200T-CN型号芯片,支持上下行速率150Mbps,兼容多网络制式模块,无缝切换3G网络与4G网络。内置丰富的网络协议,集成多个工业标准接口,并支持多种驱动和软件功能(适用于Win7/8/10,Linux,Android等操作系统下的USB驱动)。
9.摄像头模块:乐视MAKEBIT三合一体感摄像头,采用结构光技术、操控范围高达6米,深度分辨率1280*10224。
10.其他模块:OLED显示模块、语音控制模块、树莓派、轮毂电机底盘、转接板。
硬件特色
(1)核心主控板
采用TI公司的TMS320F28069型号芯片,******90MHz的时钟频率,高达256KB的闪存和100KB的SRAM,支持FPU浮点运算能力。
(2)陀螺仪模块
MPU 6050是一款6轴的IMU传感器,它集成了3轴加速度计和3轴陀螺仪,可实现对各个方向角度和速度的解算,从而实现平衡
的控制。
(3)驱动模块
TB6612FNG是智能平衡车电机的驱动模块,它具有双通道电路输出,可同时驱动2个电机;具有4种电机控制模式:正转/反转/制
动/停止;PWM支持频率高达100 kHz。
(4)蓝牙模块
TI公司的CC2540是一款低功耗蓝牙射频模块,同时是一款高性能物联网无线收发器,可广泛应用于各种场合的短距离物联网无
线通信领域。具有功耗低、体积小、传输距离远、抗干扰能力强等特点。
(5)超声波模块
HC-SR04 是一款利用超声波测距离的传感器,模块包括超声波发射器、接收器与控制电路。可提供2cm-400cm的非接触式距离
感测功能,测距精度可达高到3mm。
(6)4G远程模块
EC200T-CN是移远通信推出的LTE Cat 4无线通信模块,支持上下行速率150Mbps,具有超高的性价比;同时在封装上兼容多网络制式模块,实现了3G 网络与4G 网络之间的无缝切换。内置丰富的网络协议,集成多个工业标准接口,并支持多种驱动和软件功能(适用于Win7/8/10,Linux,Android 等操作系统下的USB 驱动),极大地拓展了其在M2M领域的应用范围。
(7)摄像头模块
乐视三合一体感摄像头集3D骨骼体感识别、手势******体感识别、视频通话等功能于一体,采用结构光技术,操控范围高达6米,
深度分辨率1280*1024,智能平衡车采用该模块进行视觉应用的开发。
小车尺寸:23.5*7.5*17.5mm
小车重量:1.07kg
车身材质:铝合金+亚克力
额定负载:1.5kg
运行速度:>0.8m/s
爬坡角度:10°
遥控方式:手机APP/上位机软件
续航时间:>5h
电池容量:10000mAh
充电方式:Type-C/Micro
扩展接口:UBS2.0/UBS3.0/以太网口
功能保护:倾角保护/转速保护/过压保护/过流保护/短路保护等
实验内容
1.TMS320F28069基础实验(C语言版/simulink版):
(1)GPIO配置实验
(2)TIMER0中断实验
(3)ePWM输出实验
(4)eCAP捕获实验
(5)SCI串行通信实验
(6)SPI串行通信实验
2.模块功能应用实验:
初级版:
(1)捕获功能之超声波测距
(2)ADC——线性CCD数据采集实验
(3)EQEP功能与编码器信号采集实验
(4)SPI通讯——OLED显示实验
(5)I2C通讯——MPU6050数据读取实验
(6)OLED显示实验
(7)速度闭环控制实验
(8)PID平衡控制实验
中级版:
(1)语音识别控制实验
(2)4G远程服务器控制实验
(3)wifi模块配置实验
(4)蓝牙控制实验
(5)陀螺仪直线运动实验
高级版:
(1)opencv图像处理实验
(2)树莓派外设控制实验
(3)人脸识别与检测
(4)多颜色识别实验
(5)机器学习SVM和KNN 训练实验
3.智能平衡车综合控制实验:
(1)智能平衡车平衡控制实验
(2)智能平衡车APP控制实验
(3)智能平衡车避障控制实验
(4)智能平衡车4G远程控制实验
(5)智能平衡车视觉识别跟随实验
(6)智能平衡车视觉寻迹控制实验
硬件参数表
|
设备名称
|
主要技术参数指标
|
|
两轮智能平衡车
初级版
|
主处理器
|
TMS320F28069 DSP
|
|
|
处理器主频
|
90MHz
|
|
|
板载仿真器
|
XDS100V2
|
|
|
移动电源
|
2800mAh 12V
|
|
|
电源管理芯片
|
TI TPS54340 & TI TPS54331DR
|
|
|
电机驱动芯片
|
TI TB6612FNG
|
|
|
陀螺仪芯片
|
MPU6050
|
|
|
蓝牙芯片
|
TI CC2540
|
|
|
其他
|
超声波模块,OLED模块,带减速电机编码盘总成,连接板,底板,车轮
|
|
两轮智能平衡车
中级版
|
4G无线模块
|
Air724UG
|
|
|
WIfi无线模块
|
ATK-ESP8266
|
|
|
语音模块
|
LD3320A
|
|
两轮智能平衡车
高级版
|
树莓派
|
2G-4B
|
|
|
体感摄像头
|
乐视三合一体感摄像头
|